
Working with Tangible GIS
Projects
Publications
Resources
Helena Mitasova, Lubos Mitas NCSU in collaboration with
Carlo Ratti, SENSEable City laboratory, MIT
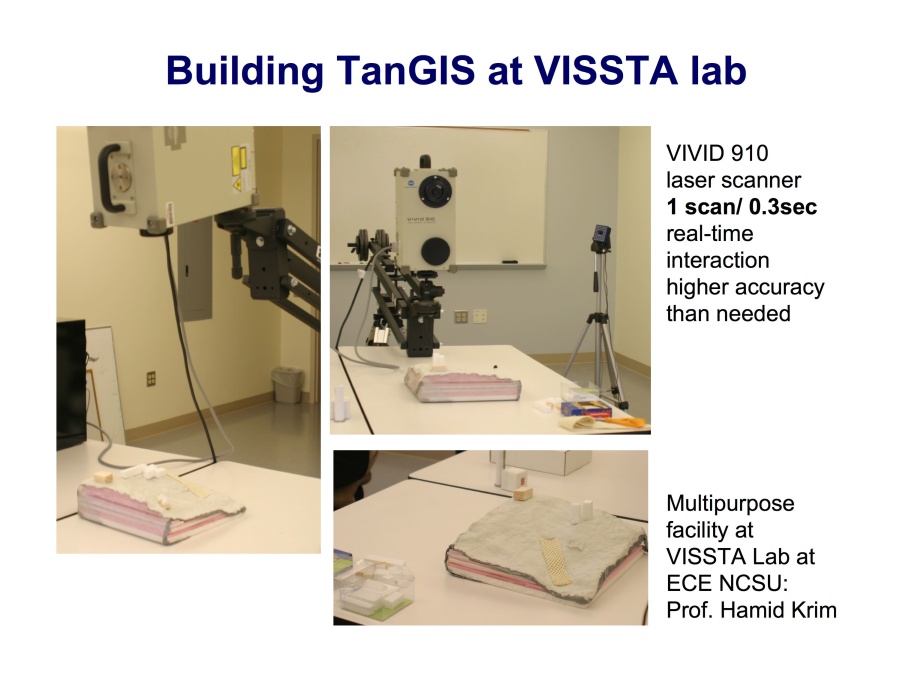
and VISSTA group, ECE NCSU
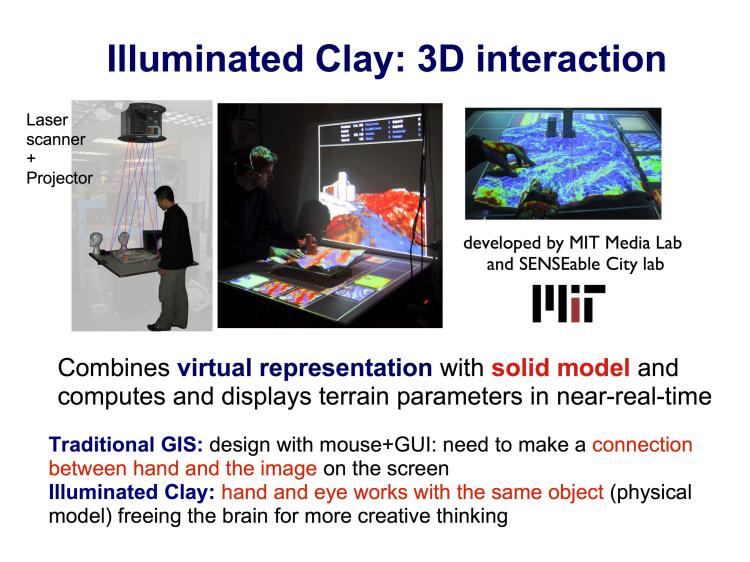
Mitasova, H., Mitas, L., Ratti, C., Ishii, H., Alonso J., and Harmon, R.S., 2006,
Real-time Human Interaction With Landscape Models Using
a Tangible Geospatial Modeling Environment,
IEEE Computer Graphics & Applications,
Special Issue - GeoVisualization, 26(4), pp 55-63.[pdf]
Tangible GIS in action: Water flow simulation, Modifying terrain and analysis Fort Bragg by Brent Fogleman
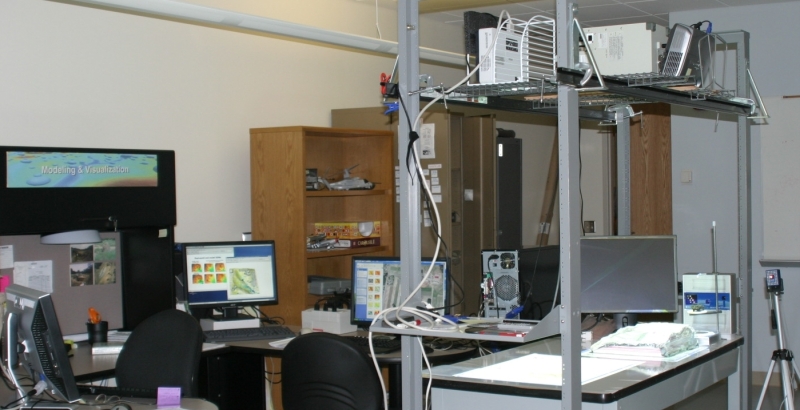
Setup January 2013


Kinect experiments
Jockey's Ridge model
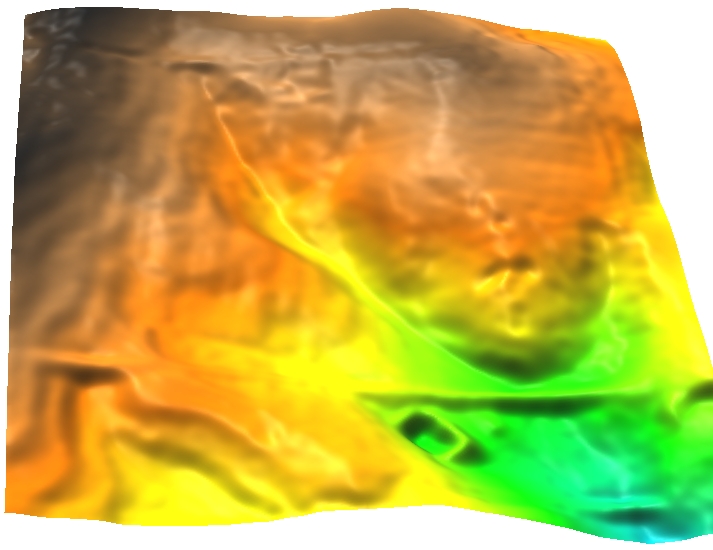
Elevation model,
slope,
sharper version,
flooded,
flow test
Sand Model:
Initial pile of sand,
Sand pile modified based on projected contours,
DEM interpolated with modified parameters,
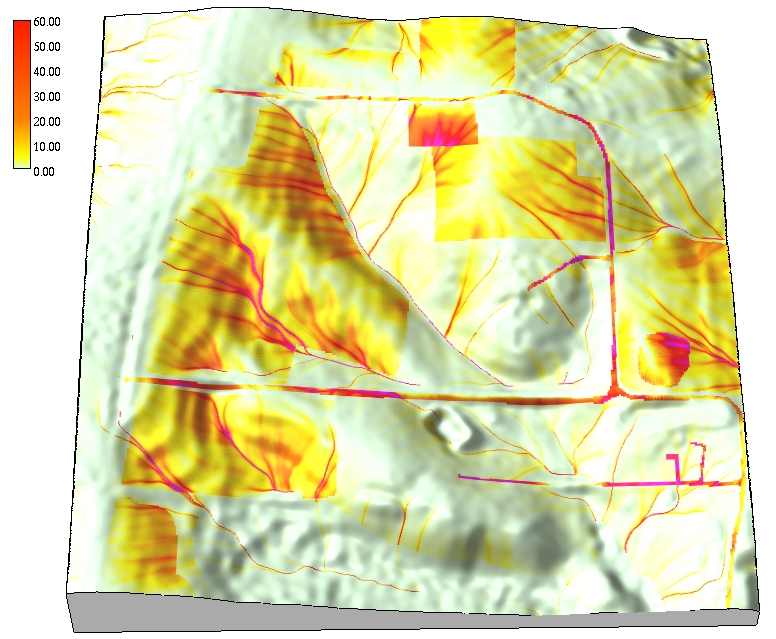
Flow accumulation over the kinect-based DEM
Setup December 2007:


 a
a b
b
DEM+cover overland flow soil detachment net erosion/depositionreal world model


plasticine models:
initial


road breach and checkdam




buildings I, water from buildings only, water from everywhere


Galery of designs by VISSTA Lab visitors
design for bioretention: elevation, water and sediment flow, solar irradiation




buildings II and III


lagoon and landscape design




buildings IV and off-road vehicle tracks, 3x z-exager



tec design



The first experiments
Animations: overland flow
over smoothed DEM derived from real-world data
over DEM from TanGIS
over DEM from TanGIS with modified surface roughness and buildings
Future system linked to real time monitoring

Terrain and wireless signal analysis for web cam monitoring



Notes
Old solid model elevation difference: 72mm representing 76ft, 6x vertical exageration, horizontal scale 1:2000,
DEM with 315x284 rows/cols at 6ft resolution and model 630x560(fix) rows/cols at 1mm resolution
New model: 50mm, 3x vertical exageration, horizontal scale 1:1200, 0.4x0.4m,
DEM 480x480m, 1m resolution, derived from lidar
Real world test area : airphotos(2005)
 a
a
 b
b
observed and simulated flow
 a
a
 b
b
 c
more photos
c
more photos
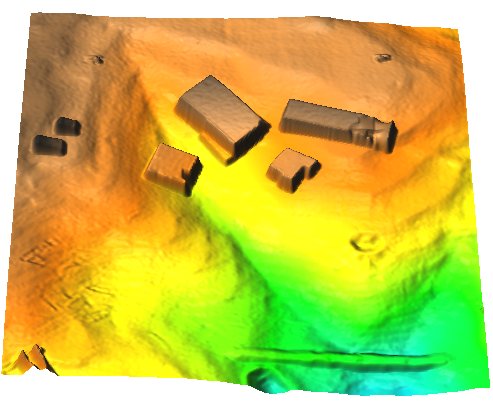
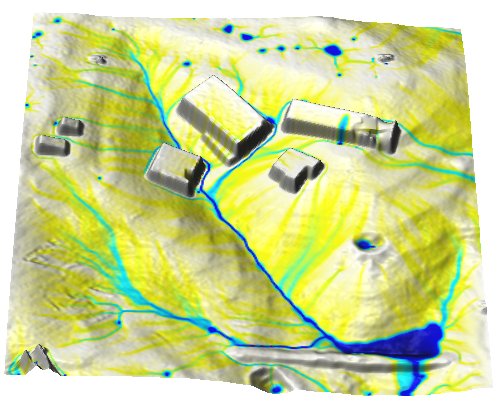
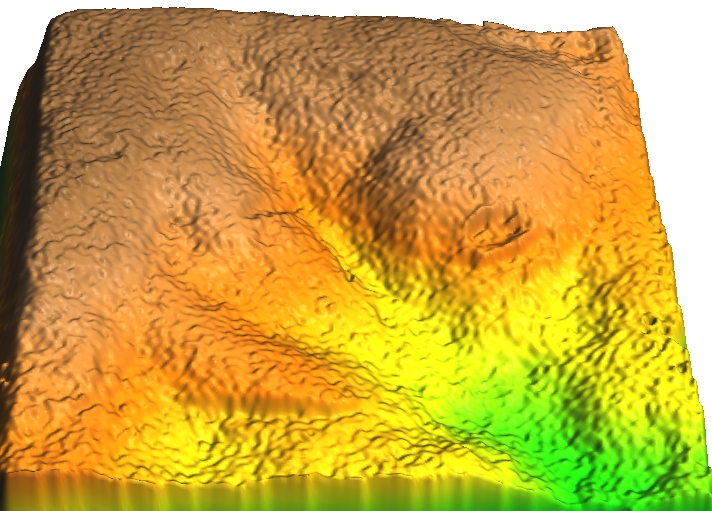
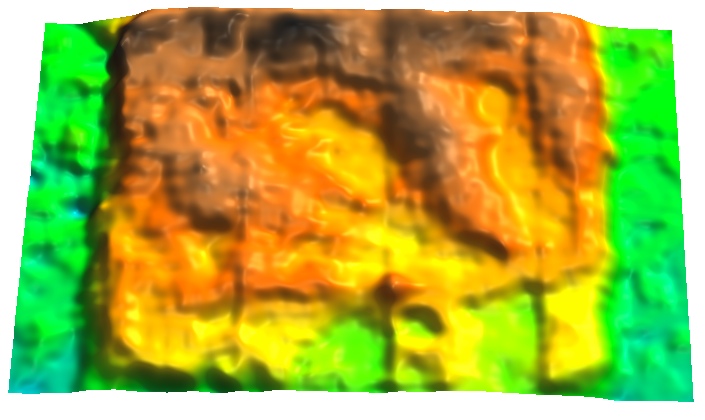
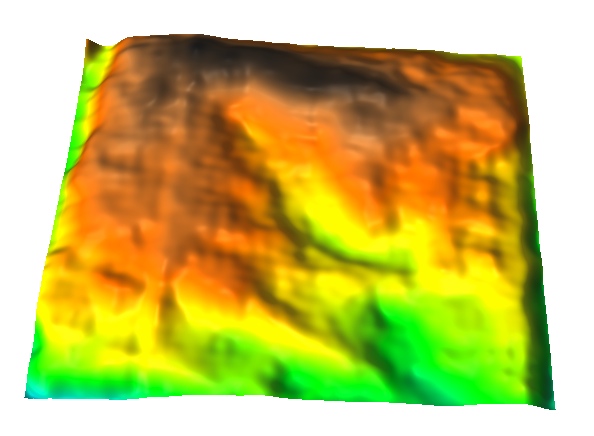
Model scanned at MIT and lidar-based DEMs
 a
a
 b
b
 c
d
c
d
a) Scanned model interpolated at 1mm resolution, high tension/low smoothing
b) Scanned model interpolated at 1mm resolution, low tension/high smoothing
c) Lidar-based DEM (2001) interpolated at 2m(6ft) resolution, high tension/low smoothing
d) Lidar-based DEM (2001) interpolated at 2m(6ft) resolution, low tension/high smoothing
Landscape properties from GIS data
 landuse
landuse soils
soils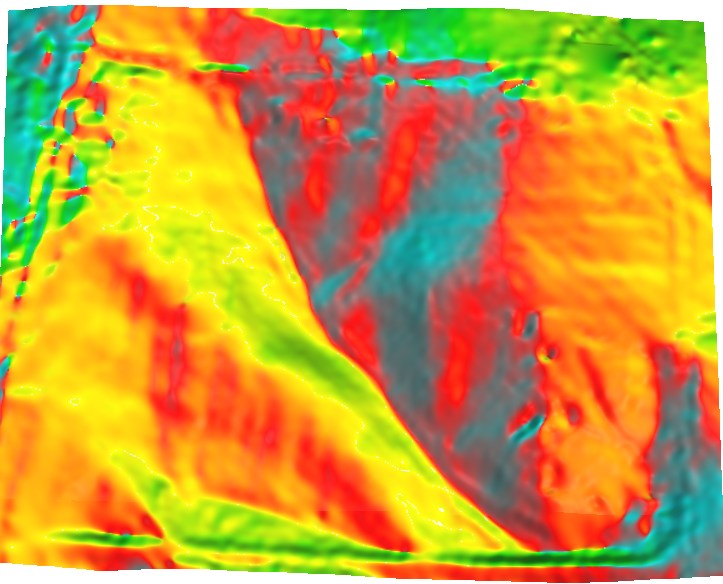 aspect
aspect slope
slope erdep
erdep solar Jan
solar Jan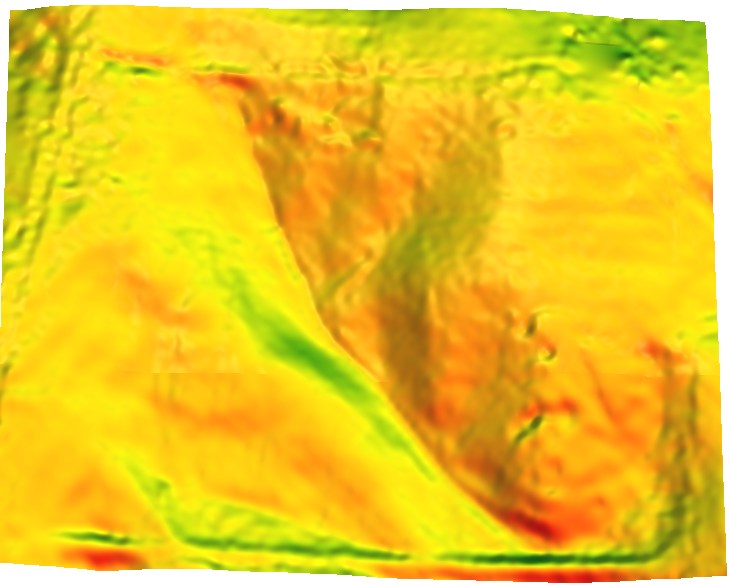 Mar
Mar Jun
Jun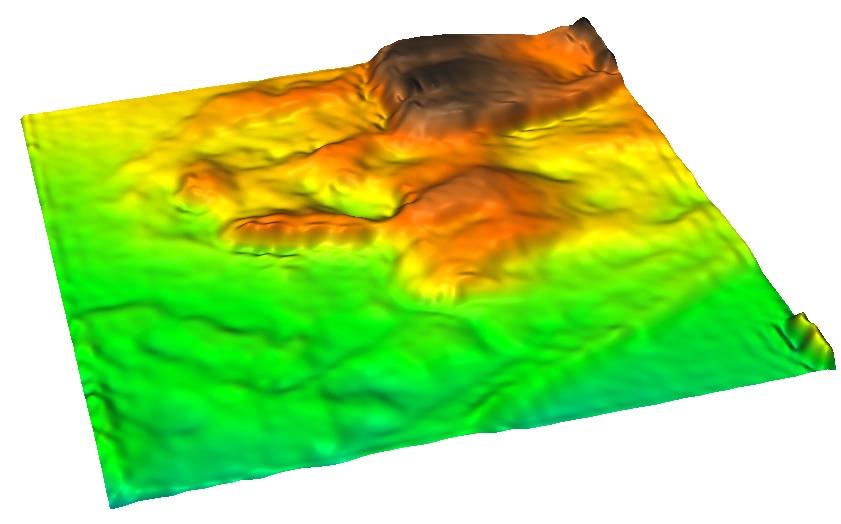{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Download:
Ready to use GRASS6 database with dynamic water flow model results in mapset lwhome
Elevation raster data in GRASS ascii format(larger area than above)
Tangible GIS: New Human-Computer Interface For Geospatial Modeling [ppt]
This project is supported by Army Research Office