Terrain modeling and Soil Erosion Simulation:
applications for evaluation and design of conservation strategies
Prepared by:
Geographic Modeling and Systems Laboratory, University of Illinois at Urbana-Champaign
Helena Mitasova, Lubos Mitas, William M. Brown, Douglas M. Johnston
for :
U.S. Army Construction Engineering Research Laboratories
Dr. Dick Gebhart (rozpis)
Matt Hohmann (oprav)
Annual Report
2000
review all new results
1. Introduction
New mapping and environmental monitoring technologies generate large volumes of high resolution spatio-temporal data and offer unique opportunity to dramatically improve the land management, alleviate environmental pressures and preserve biodiversity. The major challenge for the rapidly evolving geographical information science is to provide methods and tools for effective use of these data for environmentally and economically sound land use management, with focus on proactive prevention rather than just remediation of environmental problems. Many areas face increased pressures from urban development and at the same time large resources are being invested in conservation efforts with significant uncertainties about their effectiveness. It is therefore crucial to speed-up the relevant landscape modeling and management research so that it can provide the tools to evaluate the impact of changes before they are implemented and to support design of new, effective conservation and pollution prevention strategies.
The landscape-scale land management strategies are extremely difficult to test experimentally because of the cost and time requirements of such experiments and because of limited possibilities to evaluate their functioning under extreme conditions. Laboratory experiments, while useful, often behave quite differently from large-scale real-world systems, thus limiting the applicability of their results. Field experiments can support the studies of certain properties of conservation measures, however, they are constrained both spatially and temporally and cannot capture the long-range interactions typical for fluxes in complex landscapes. One area of special promise to address these issues is simulation modeling which can give decision makers interactive tools for both understanding the system and judging how management actions might affect that system" (NRC, 1999)".
One of the key challenges in environmental modeling research is the description of interacting physical processes with sufficient accuracy and efficiency. It is clear, that a rapid development of computer technology offers new opportunities to tackle extremely complex environmental problems. In fact, computational simulation and modeling is becoming a third way of performing scientific research complementing the traditional experiments and analytical theories. Computational approaches belong to "young" methodologies which were developed only over the past few decades and their progress is closely tied to the advances in computer capabilities. As such, they have their own rules, challenges, successes and limitations. The role of algorithms, data structures, computationally efficient methods, advanced visualization and exploration of parallelism are crucial for new advances in environmental research and require close collaboration between traditional research disciplines and computational science.
Originally, GIS applications were focused on static spatial data processing, analysis and computer cartography. However, development of new geospatial data collection technologies and computer capabilities together with acute environmental problems have pushed the GIS applications into more sophisticated levels. Advanced geoscientific applications involve multidimensional phenomena (e.g., Mitasova et al 1995), dynamics (Burrough 1998, Mitas et al. 1997), supercomputing class simulations as well as real-time processing of huge amount of measured data (Catin and Fortin 2000). Nevertheless, the process-based modeling of the geospatial phenomena involves substantially more uncertainty than modeling in physics or chemistry. One of the key reasons is the above mentioned complexity of studied phenomena. The practical solutions then have to rely on the best possible combination of physical models, empirical evidence, intuition and available measured data. In physics, the accuracy is usually understood in a much stricter sense, because many fundamental laws are known over a broad range of scales in energy, distance or time. For example, Schrodinger equation describes the matter at the electronic level virtually exactly, that means, within spectroscopic accuracy of 6 to 12 digits. This is seldom the case in complex geoscientific applications where 50% differences between measurements and model predictions can be in many instances considered satisfactory.
In spite of significant progress in Geographical Information Systems (GIS) technology and environmental modeling (Goodchild et al. 1993, 1996, 1997, GIS/EM4 2000, Boyle et al. 1998, Kellershohn et al. 1999, Mitasova et al. 1995, Wilson and Lorang 1999, Band et al. 2000) there are persistent problems with accuracy and reliability of spatial simulations, preparation of data is often time consuming and running the models requires substantial expertise. Finally, the modeling efforts have focused on analysis of the current state and prediction, while their use for development of new land management and conservation strategies is largely unexplored.
In this report we address the issues of creating the digital representation of the landscape suitable for environmental modeling and simulations of processes, methodologies for robust multiscale modeling of landscape fluxes with focus on conservation planning and design, GIS implementation issues, and applications to military installations.
Methods
State of the art land use management is based on extensive use of GIS technology which provides tools for:
creating a digital model of the managed landscape with its features and properties
spatial analysis and identification of "hot spots"
spatial modeling and simulations
digital cartography and visualization
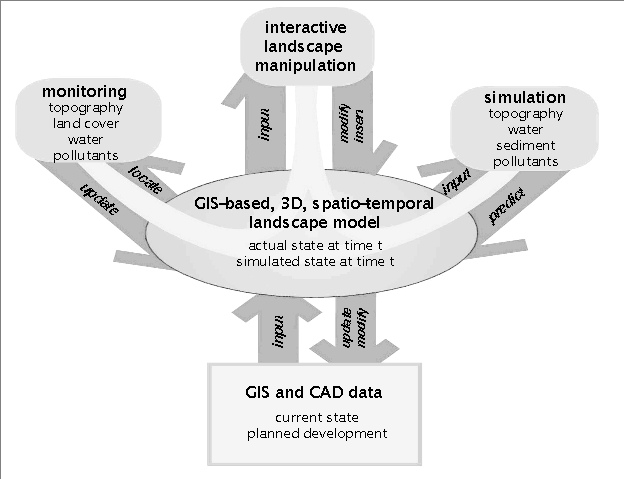
GIS supported model of the studied landscape provides the basis for landscape monitoring, analysis and simulation (Figure 1). To fully support land use management the landscape models should be created as a multi-resolution representation using the combination of a regional scale, low resolution model with embedded high resolution models for monitoring and simulation of "hot spots" (Mitas and Mitasova 1998b). Multiscale approach to land use management is supported by a new generation of high resolution geospatial data, robust and flexible simulation methods, such as path sampling, and process based models which adequatelly represent the phenomena important for conservation of natural resources.
Figure 1. GIS role in integration of landscape monitoring, analysis, planning and simulation.
New generation of input data
New mapping and distribution technologies have dramatically increased access to geospatial data at unprecedented detail and coverage. However, the old problems with data consistency, reliability, seamless coverage have become a major obstacle for effective use of these data. In the following sections we describe some of the new GIS data that we had available, evaluate their suitability for modeling of landscape processes and identify the type of processing that may be needed to use these data effectively.
Digital elevation data While significant progress has been made in the development of digital elevation data, the DEMs remain the main source of problems when applying hydrologic and erosion models at landscape scale. Our experience as well as others (e.g., Heinzer et al., 2000) demonstrates that significant effort is needed for processing the DEMs before they can be used for modeling. We have evaluated the following elevation data:
USGS DEM at 10m resolution was created by USGS from the same source as the 30m DEM, however more accurate interpolation was used and elevations are available with vertical precision of 0.1m rather than 1m reducing the "step" effect. In spite of using the same data source the quality of this DEM superior compared to the 30m DEM (see USGS documentation about the accuracy). Besides the increased precission, accuracy and resolution, the DEM provides much more detailed description of terrain features. Several new problems due to the TIN-based interpolation method were observed, such as waves along contours, in steep areas, leading to artificial erosion/deposition pattern; noise, especially in flat areas, leading to noisy and incosistent contours and artificial dams in valleys due to triangulation. However the magnitude of these artifacts is much smaller than in previous models and it is within the DEMs accuracy. The negative impact on modeling results is visible (Figure 3, ponding due to TIN-based dams) but can be further reduced by smoothing and/or reinterpolating the data and stream enforcement.
Figure
2. New 10m DEM a) with slope draped over the surface, the pattern
indicates waves along contours in some areas, b) with flow
accumulation map and contours, which are noisy in the areas of
relatively flat terrain, c) elevation histogram clearly shows the
waves along regular intervals.
DEM from digital photogrammetry, at 5-10m resolution. They are usually derived from TIN, generated from aerial photos, by applying an appropriate interpolation method. The DEM that we obtained for Ft. Hood had vertical precision 1m, which is insufficient for correct estimation of slope pattern (and consequently also the erosion/deposition), especially in areas with relatively flat terrain. Moreover, the use of TINs in both cases creates artificial dams in valleys (see figure showing ponding water due to these dams) This is a known problem of TINs and controlled triangulation should be used. The negative effect of insufficient vertical resolution can be partially reduced by reinterpolating the DEM-see the procedure in GIS section. There is a dramatic difference between the distribution of slopes between the 1m integer DEM and floating point precission DEM (Figure 4.) The elevation data that we have obtained for Fort Polk were in the form of contours and TIN points so we have performed the interpolation using the RST method (see Mitasova et al. 1999)
Figure
3. Histogram for a slope map a) original Ft. Hood 10m DEM has
discrete distribution of slopes, with certain values of slope not
represented at all, b) slopes from reinterpolated DEM have continuous
distribution (see the consequences for erosion modeling in the
application section).
IFSARE DEM was available for Ft.Hood. It was adequate for areas without vegetation, however it was unusable for vegetated landscapes (Mitasova et al 1999). A small sample of LIDAR data that we had available was insufficient for evaluation, however based on literature (e.g. Heinzer et al. 2000) and personal communication with USGS LIDAR provides the most accurate remotely obtained data and should be evaluated for erosion modeling and conservation planning.
Rapid kinematic survey based on mobile GPS provides high resolution data with inch vertical accuracy (data courtesy Kim Drackett). We obtained the data in the form of scattered data points, so interpolation was necessary to compute a DEM. This is a fast, efficient and accurate method for obtaining data with great detail for smaller areas - see example at (Mitasova et al.
http://www2.gis.uiuc.edu:2280/modviz/pfar/farm1.html).
Direct field measurements by total station were by far the most accurate and detailed data that were available (see Mitasova et al. 1999) and for small areas where engineering structures for conservation and pollution prevention need to be installed this type of measurements would be required.
It would be useful to test other types of DEM which land managers might have available to find out whether there is any type of DEM which would not require any preprocessing for erosion modeling from land managers.
Land cover The resolution and detail of new land cover data sets has greatly increased, compared to the widely available 30m land cover derived from Landsat imagery. For example, Fort Hood now has 1m resolution vegetation data, which represents a dramatic increase in spatial variability compared to traditional polygon based data (Figure 4a,b). It is therefore necessary to evaluate when such a detail is needed and when it can obscure large scale patterns and phenomena. Also the resolution does not always represent the spatial accuracy, for example - the classification procedure for the Fort Hood vegetation data used a 10m resolution DEM (so any spatial variability within the 10m which may be influenced by topography could be missed). Also, forests along streams were classified as alluvial forest based on a uniform distance from the stream, while in reality the width of the flood plain and its related vegetation greatly varies. e. We are currently comparing the high resolution vegetation data with the C-factor estimated for the soil erosion inventory performed by NRCS at Fort Hood and the first results indicate major differences so further testing is needed to evaluate how these data need to be processed to provide reliable estimate of the C-factor.
Figure
4. Vegetation map a) old polygon based coverage, b) new 1m
resolution raster.
Soils Comprehensive soil data in digital form are available from NRCS SSURGO database. The data are provided in polygon form, which means sharp boundaries between soil types, with the boundaries carrying high level of uncertainty . The database includes large number of parameters therefore map layers representing the input parameters for erosion models, such as K-factor can be easily extracted.
Figure
5. K-factor draped over a DEM. It was derived from the polygon
soil map in ArcInfo and imported into GRASS as a 5m resolution
raster.
Rainfall We did not obtain any directly measured rainfall data therefore we used the R-factor from NRCS and data from literature (e.g., Haan et al. 1994). We have developed a methodology for interpolating rainfall data from meteorological stations with incorporation of topography and tested its accuracy for estimation of long term discharge averages in collaboration with researchers in Slovakia (Parajka et al., 2001). This method will be useful when the rainfall data from stations become available.
Erosion model parameters Some erosion model parameters are currently available on-line (see SedSpec, online RUSLE, etc.) and can be used if the installation does not have already such data available. However, these data usually have low resolution or are spatially averaged.
2.2 Modeling of landscape processes at a hierarchy of scales
Process-based modeling of geospatial phenomena is difficult and often involves a much higher level of uncertainty than, for example, simulations of microscopic systems in physics or chemistry which are based on virtually exact theories, such as quantum mechanics. Key reasons for these modeling difficulties are the complexity of landscape phenomena, the multitude of processes acting across a range of scales, non-equilibrium phenomena and/or lack of experimental data. The practical solutions rely on the best available combination of physical models, empirical evidence, experience from previous studies and available measurements. Landscape processes are therefore often described by a combination of physically-based and empirical models, and integration with field measurements using data adaptive simulation is especially important for increasing the reliability of predictions (e.g., Cantin and Fortin 2000). Typically, the physically-based models have the following components (Mitasova and Mitas, in press):
Model constituents with corresponding physical quantities such as concentration, density, velocity, etc. In general, the physical quantities depend on position in space and on time and can be characterized either as fields, particles or ensembles of particles.
Configuration space and its range of validity for fields and/or particles. This includes specification of initial, external or boundary conditions, as well as physical conditions and parameters.
Interactions between the constituents such as impact of one field on another, interactions between particles and fields, etc.
Governing equations derived from natural laws which describe the behavior of the system in space and time. The typical examples are continuity, mass and momentum conservation, diffusion-advection, reaction kinetics and similar types of equations.
Many natural processes involve more than a single scale and exhibit multi-scale, multi-process phenomena (Steyaert 1993, Green et al. 2000). Problem of multiple scales permeates several scientific disciplines such as materials research, physics, and biology. Many multi-scale problems can be partitioned into a hierarchy of effective models which are nested in the direction from fine to coarse scales. At a given scale the model incorporates simplified or "smoothed out" effects coming from finer, more accurate levels. In the direction from coarse to fine scales, one develops a set of effective embeddings which determine boundary and/or external conditions for the processes at finer scales. The fine scale processes are then modeled at high resolution only in "hot spots" of the studied system (Mitas and Mitasova 1998b, Mitasova and Mitas in press).
Multiscale modeling in GIS can be performed using various approaches:
combination of a low resolution spatially averaged model (e.g. SWAT) applied at a regional scale with a high resolution distributed model (e.g. SIMWE) applied for selected hydrologic units - usually high risk subwatersheds or units with proposed use change
nested grids - grids at different resolution are used
irregular meshes with spatially variable density, such as TIN
2.3 Path sampling
Nested grid approach is very well suited for implementation or link with GIS, because it relies on data structure which is standard and well supported within GIS. Spatial processes described by the governing partial differential equations are usually solved by discretization techniques such as finite difference (e.g., Doe et al. 1996) and finite element methods (e.g., Vieux et al. 1996). In our previous work we have proposed to use an alternative method called path sampling. Similar methods are known as path integrals in physics (Ceperley 1995) or random walks in stochastic processes (Karlin and Taylor 1981, Gardiner 1985). The path sampling is based on the fact that essentially any field can be represented by an ensemble of sampling points. For example, a scalar field can be determined by the distribution (spatial density) of sampling points in the corresponding region of space; conversely, ensembles of particles are often described by continuous fields. The duality of field <=> particle density is routinely employed in physics and helps to reformulate and solve complicated problems involving interacting systems with many degrees of freedom. The path sampling method has been successfully used in physics (Ceperley and Mitas 1996), chemistry (Hetenyi et al. 1999, Forsythe and Makri 1998), finance (Ingber 2000), etc., for linear or weakly nonlinear transport or time propagation problems which involve processes such as diffusion, advection, rate (proliferation/decay), reactions and others. It has several important advantages when compared with more traditional approaches. It is very robust, can be easily extended into arbitrary dimension, is mesh-free and is very efficient on parallel architectures including heterogeneous clusters of PCs and workstations. Path sampling is also rather straightforward to implement in a multi-scale framework with data adaptive capabilities. The method has been successfully used for distributed modeling of overland water and sediment flow and erosion/deposition studies (Mitas and Mitasova 1998a), including multi-scale applications (Mitas and Mitasova 1998b), and modeling of dissolved and suspended substances in lakes, estuaries and coastal areas (Dimou and Adams 1993, DHI 2000).
Using the duality field <=> particle density, processes can be modeled as evolution of fields or evolution of spatially distributed particles (Fig. x). We use the water and sediment flow simulation for a subwatershed at Hohenfels (Mitasova et al. 1999Rep) to explain the basic principles of path sampling. First the source - in our case rainfall excess (rainfall - infiltration) is sampled with densities of particles representing the varying rate of rainfall excess - see Figure 1 . Size of the path samples is selected based on the resolution / spatially variability of the source. Note higher density of particles in the disturbed areas with compacted soil and reduced infiltration.

Figure
6. Sampling of the rainfall excess source field by particles with
density proportional to the rainfall excess rate.
These path samples are then propagated according to the function G( r,r',p) generating a number of sampling paths. Averaging of these path samples provides an estimation of the actual solution with statistical accuracy proportional to 1/\sqrt{M}, where M is the number of walkers. The solution is not restricted to the steady state and the state of the modeled quantity at any given time can be obtained by averaging the path samples at that time.
b
Figure 7. Path sampling solution of the continuity equation for water depth using duality between particle and field representation: a) water depth at 1 minute, b) water depth after 24 minutes. The grid is 416x430 cells at 10m resolution. Click on b) to see the animation.
Path sampling for sediment is more complex, when deposition occurs the size of the path sample (representing the mass associated with it) is reduced until the path sample diminishes. The rate of this process is controlled by the first order reaction coefficient which for sand is greater than 1, the particles move only for a short distance and deposit quickly, while for clay, (with the coefficient 0.001) the particles are transported over long distance (see Mitasova et al. 1998), here we illustrate it using the particle representation (Figure 8. animation). Path sampling was implemented as SIMWE. The SIMWE model was enhanced to output the temporal development of water and sediment flow both for the uniform and multiscale version. The spatio-temporal version was tested for Hohenfels and the results clearly demonstrate the negative impact of compacted soil by moving large amounts of water and sediment into the stream very quickly, compared to slow movement of water within the forested subwatersheds - while this is a known fact the animation (Figure 7) from the model may serve as a strong demonstration tool of how big the difference is.
Figure
8. Path sampling solution for sediment transport for a) sand, b)
clay. Click on the images to see the animation.
Multiscale path sampling was briefly introduced in Mitasova et al. 1999, report, here we provide a more illustrative explanation through particle representation. The approach is useful for high resolution modeling of "hot spots", such as locations undergoing substantial land use change or areas targeted for installation of conservation measures. The implementation is based on multipass simulation. First, the entire area is simulated at lower resolution, and the walkers entering the high resolution area(s) are saved. The saved walkers are resampled by splitting each walker into a number of "smaller" walkers which are randomly distributed in the neighborhood of the original walker. The model is then run at high resolution only for the given subarea, with the resampled walkers used as inputs (Fig.9). If several different land use alternatives are considered for the given subarea, this approach can be used to perform simulations for each alternative only within the high resolution subarea. The approach also provides useful spatial information about the locations where water flows into the given subarea and where it flows out (Fig. 9), see also (Mitasova et al. 1999)
Figure 9 Multiscale path sampling based on nested grids: a) samples at the start of the low resolution simulation, b) low resolution samples after 25 minutes, with samples which reach the high resolution area shown in darker blue color, c) initial state of high resolution simulation with larger number of smaller particles, d) high resolution samples after 15 minutes. (Click on the image to run animation)
2.4 GIS-based modeling for conservation planning and design
GIS plays a fundamental role in state-of-the art landscape-scale conservation planning. While design of individual conservation measures, such as ponds, dry dams, grassed waterways is well served by CAD software tools and a specialized engineering software, landscape-scale planning requires a broader view of the spatial relations which better supported by a GIS. It allows to import, process and analyze geospatial data from a wide range of sources, such as remote sensing, digitized maps, field measurements and get a synergistic view of the studied landscape and its components.
Landscape scale conservation planning While spatially averaged models are useful for identification of high risk hydrologic units they are not very well suited for conservation planning, therefore fully distributed models are needed. At the landscape scale the goal of modeling is to identify areas with high erosion risk due to the combination of insufficient land cover and terrain configuration (steep slope, convex terrain shape or convergent topography), and evaluate general conservation strategies such as implementation of stream buffers and selection of large conservation areas in high risk locations. Fast and efficient approach is to use the models which represent limiting case of erosion regimes and are simple to compute in GIS by combining the flow-tracing and topographic analysis functions with map algebra. They can be applied to a single storm, monthly and annual estimates of soil detachment and net erosion/deposition. Various versions of the RUSLE model modified for complex topography (RUSLE3d) can be used to estimate soil detachment pattern (Mitasova et al. 1999, Desmet and Govers 1996), while the USPED model identifies the potential of landscape for net erosion and deposition. Both models use readily available parameters and can provide valuable spatial information about: (i) the location of areas with high erosion risk from both shallow overland and concentrated flow, (ii) relative estimates of erosion and deposition rates for different land use alternatives and conservation strategies. Locations identified as high risk from both RUSLE3D and USPED should be primary targets for field erosion inventory (to validate the risk) and implementation of prevention/mitigation measures (if the high risk is confirmed in the field). Computation of net erosion and deposition is also useful for evaluation of the landscape's capacity to deposit the eroded material before it can reach the streams. Erosion from concentrated water flow is not very well integrated in the traditional models. RUSLE3d and USPED can identify the areas with this type of erosion, and we are using the data from erosion inventory at Fort Hood to develop suitable parameters which will provide adequate quantitative estimates of concentrated flow erosion from these models.
The practical application of distributed watershed scale evaluation of various conservation strategies (see http://www2.gis.uiuc.edu:2280/modviz/courtcreek/lhu52/cctable.html)
compares the erosion risk and net erosion/deposition pattern for :
uniform disturbance of entire watershed,
stream buffers with various width,
combination of stream buffers and conservation areas on steep slopes and
model based design of critical conservation areas (which include headwaters)
The current riparian buffers are often designed based only on the distance from the streams neglecting the impact of topography, especially the areas with convergent water flow. Preliminary results from simplified models indicate that in areas with complex terrain increased water and sediment flows from intensively used uplands may get through the buffers because of unprotected headwater areas and thalwegs. While the benefit of riparian buffers for the stabilization of the riparian area and reduction of sediment and pollutant loads delivered to streams is well known, the modeling results show that the buffers are often too narrow and offer surprisingly small benefit for the stability of the entire watershed unless at least steep slopes and concentrated flow areas are well protected. Similar analysis is being performed for the Fort Polk subwatershed (see section 4).
Modeling high resolution effects of conservation measures Conservation measures reduce erosion, restrict sediment transport and prevent sediment pollution by reducing runoff, soil detachment and transport capacity of overland flow and by trapping the transported sediment. The long term effectiveness of conservation measures depends upon complex interactions and to capture these interactions at sufficient detail, process-based distributed models are needed. We have evaluated the suitability of SIMWE for simulation of some well know effects of conservation measures so that the missing capabilities could be identified and developed and the benefit of simulations for effective design of conservation measures can be evaluated.
Based on the landscape-scale analysis of erosion risk, which identified the concentrated flow erosion as one which lacks sufficient modeling and conservation support, we have studied the conditions for the development of concentrated flow erosion and the effectiveness of grassed waterways for its prevention. Development of high erosion in areas of concentrated flow was studied by performing simulations of water flow and net erosion deposition for an experimental field with uniform land cover (350x270m, modeled at 2m resolution; Zhang, 1999, Mitasova et al. 1999). For a short rainfall event ending before the flow has reached steady state, the maximum erosion rate was on the upper convex part of the hillslope and there was only deposition in the center of the valley (Fig. 10a). As the duration of the rainfall increased, water depth in the center of the valley has grown rapidly until it reached a threshold when linear features with very high erosion rates developed within the depositional area, indicating potential for gully formation (Fig. 10b). This effect can be modeled by both USPED (Mitasova et al., 1996, 1999) and SIMWE (Mitas and Mitasova, 1998), however, a smooth, high resolution DEM without artifacts is needed to realistically capture this commonly observed phenomenon (see Fig. 2c in Mitas and Mitasova, 1999). Increase in the roughness in the field "delays" the onset of erosion in the center of the valley by making the water flow ridge wider and lower. For n=0.01 the erosion occurs for XX rainfall intensity, for n=0.1 the erosion in the valley starts for XX rainfall. Uniform increase in the density of vegetation can play an important role in reducing the risk of gullies and the simulations can help to find the surface roughness/vegetation density which has to be maintained to prevent gully formation for the given (e.g. Maximum, 100 year, etc.) rainfall intensity and duration.
a
b
c
d
Figure 10. Water depth and net erosion/deposition pattern for 18mm/hr rainfall excess for a) short event, with only deposition in the valley center, b) long event leading to steady state flow, with both high erosion and deposition in the valley center, indicating a potential for gully formation c) long event (steady state) with bare soil, d) steady state with dense vegetative cover. The 350x270m field is modeled at 2m resolution.
Grassed waterways The common practice for prevention of erosion by concentrated flow are grassed waterways. Their design is guided by the topographic conditions and roughness within the grassed area, represented by Mannings coefficient (SCS, 1988). To investigate the impact of a grassed waterway, the water and sediment flow as well as net erosion/deposition pattern were simulated for a field within the Scheyern experimental farm (Auerswald et al., 1996; Mitas and Mitasova, 1998) for the bare soil conditions and after the installation of grassed waterway with different values of roughness in the field. For the bare field, there is a potential for gully formation (Fig. 11a). After the installation of grassed waterway the center of the valley
becomes a depositional area. However, if the roughness in the field is several times smaller than in the grassed area, high erosion develops around the waterway, potentially replacing one big
gully with two smaller ones. This "double channeling" problem can substantially increase the cost of the waterway maintenance (Fig. 11b). Increasing the roughness in the field reduces the risk of double channeling and the transition from erosion in the field to deposition in the grassed area is relatively smooth (Fig. 11c). An alternative solution combines contour filter strip on the upper convex part of the hillslope with grassed waterway (Mitas and Mitasova, 1998).
Figure 11. Impact of grassed waterway and differences in roughness on sediment flow: a) bare field with gully potential in the center, b) grassed waterway (light grey, n=0.1) and the bare field ( dark grey, n=0.01) with sediment flow along the grassed waterway (double channeling), c) grassed waterway (n=0.1) and the field with increased roughness (n=0.05) without increase in sediment flow along the waterway and smooth transition from erosion to deposition.
Benching effect of hedges has gained an increased interest as a cost effective alternative to more complex terraces. Hedges are about 1-1.5m wide strips of dense vegetation installed along contour lines and the field data suggest that the combination of water erosion and tillage leads to natural creation of terraces along these hedges (Figure 12, Dabney et al., 2000). Modeling the impact of hedges poses a special challenge - the deposition is observed within and above the hedges which means that backwater effect is present, erosion is observed below the hedges due to the cleaner water coming from hedges. Moreover, increased deposition above the hedges is observed in swales with convergent flow and increased erosion is observed on noses with dispersal flow. Interaction of these complex phenomena make it difficult to predict these effects using the traditional approaches based on 1D flow over predefined hillslope segments and a 2D continuous diffusive wave approximation which incorporates also the terrain change is needed. We have used a time series of SIMWE (Mitas and Mitasova 1998) simulations which included the change of terrain due to erosion and deposition, to evaluate the suitability of the model for predicting the functioning of hedges. Terrain and erosion/deposition pattern development after 7 steady state events with uniform rainfall excess 36mm/hr, and Mannings n=0.2 (hedge) and n=0.15 (field) results in deposition above and within the hedge and erosion below the hedge (Figure 8.6). The impact of swales and noses is also correctly simulated due to the use of 2D flow in simulation. These results are preliminary and are used to further develop the model so that the dynamics during the event as well as the temporal change in terrain can be properly simulated.
Figure 12 shows the change in the topography measured 3 years after the hedges were installed at a National Sedimentation Laboratory's experimental field (Dabney et al, 2000).
Figure 13 illustrates some of the results. As in grassways, the big difference in roughness between the bare area and hedge causes sharp increase in water depth within the hedge and consequent erosion both above and below the hedge. In the field experiment, hay bales were placed each 9m perpendicular to the hedge to prevent this negative effect.
The third example (Figure 9e) shows the same simulation as in (Figure 9d) with a reduced diffusion term and without smoothing of the new elevation surface between the events
(which represents the smoothing effect of processes which influence the terrain surface between the events). After 7 events, rill-type features developed in the lower part of the hillslope in swales. Surprisingly besides the expected development of bench the model developed also extensive rills over time for the case when the overland flow had only small diffusive component.
3. GIS implementation in ARC and GRASS5
There have been substantial changes in both Arc and GRASS over the past year which have improved the capabilities of both systems. We describe the innovations and their impact on erosion modeling and conservation planning and provide detailed description about some GIS processing of data useful for improving the simulations and conservation design.
3.1 ArcGIS8 versus ArcView implementation, ArcModel18
Bill - can you write something about this?
We were approved as a beta testing site for ArcInfo 8 and we have recieved and installed the software. We are preparing the test data to evaluate the best approach to creating a easy to
use interface for erosion modeling - compared to ArcView3 Spatial Analyst the new Arc8 has more intuitive map algebra making the implementation much easier. Also the problem with floating point data being lost during the computation should have been solved but we will test it thoroughly.
Implementation in ArcModel can be done only as overlay? See example by ESRI...
The approach was comapred with the methodology used at Purdue University (Engels 2000) for modified USLE within ArcView - same problems with the lack of full support for floating point data in ArcView was observed
3.2 Open source GIS implementation with new GRASS5
Transformation of GRASS to opensource .Additionall capabilities developed all over the world could be available at no cost to army land managers -examples of new tools. Thcapabilities of this GIS are substantially enhanced by links to additional open source tools, such as R statistical language (Bivand and Neteler 2000) and PostgreSQL database system (PostgreSQL 2000).
It contributes to the rapidly growing open source geospatial computing infrastructure and benefit from modifications and enhancements by international team of GIS developers.
Resampling DEMs (GRASS, Arcinfo, see Heinzer 2000)
r.random owl10.el nsites=100000 sites_output=owl10.100K
s.surf.rst -t owl10.100K elev=owl10.rst80 ten=30 smo=0.2 npmin=350 dmin=20 slo=owl10sl.rst asp=owl10as.rst
Visualization and design Visualization plays an important role for evaluation of the input data nd results of simulations as described e.g. By Mitas et al., 1997 or in our previous reports Mitasova et al. 199* GIS is well suited for sketch design, an excellent example of the concept, its GIS implementation and combination with simulations is provided in HydroPEDDS (Johnston and Srivastava 1999). add here some material about it??? SedSpec??? get more info
The concept can be further enhanced by providing capabilities for sketch design in 3D space. To test the concept, we have used the interactive spatial query tools in the 3D visualization environment NVIZ to interactively define the conservation areas on 3D terrain model guided by the results of erosion simulation which was draped over the terrain surface (Figure 12). The stored boundary of the conservation area is then transformed to the raster map by a script BILL add here the name of the script and attach the script in the Attachment. The raster map is then used for generating new set of hydrologic and erosion model parameters which are used as inputs for simulating the impact of this new land use design. The design is further supported by a capability to interactively check the water flow from a given point on the terrain surface to identify potential terrain obstacles or depressions.a (BILL please find that piece of code and put on the web so that it can be implemented in nviz2.2).
FIGURE 14 Interactive 3D LU design with NVIZ and 3d analyst
Post processing - reports, color tables, ....., histogram, categories (find on NRCS website?)
4. Applications
Two study areas were used to demonstrate some of the presented concepts and approaches. Ft.Hood where a project which aims at comparison of different erosion models is carried on and Ft.Polk. Both were modeled with new sets of geospatial data, so it is also a test/evaluation of suitability of the new type of data for erosion modeling and land management.
4.1 Fort Hood overland and concentrated flow erosion
Fort Hood was studied at installation scale at (50-30m resolution), watershed scale (10m resolution: Owl creek, recently also House creek and Henson creek watersheds were added) and small watershed/field scale (Cs study, Mitasova et al. 1999).
Installation scale study (using low resolution data and/or downscaled high resolution data. Topographic potential for detachment - erosion risk map - useful for planning new activitie which can change the land cover, input for land optimization tools. One example of application - identification of road segments at high risk of erosion. When combined with land cover and soils assessment of current state of erosion can be provided (Figure X)
Figure 15 Installation scale erosion risk analysis a) soil deatchment risk, b) segments of roads in high erosion risk locations.
At the landscape/subwatershed scale 10m resolution we have computed the soil detachment patterns. The 10m DEM was resampled to minimize the negative effect of integer values (see section 2). The following parameters were used for the annual average: R-factor (280), spatially variable K-factor from the soil map with K=....., Cfactor estimated based on the 1m resolution land cover resampled to 10m with the following values (based on my educated guess and previous work at Ft.Hood). The C-factor will be imporved using the data from NRCS
Forest 0.001 Live Grassland/Herbaceous 0.005 Dormant Grassland/Herbaceous 0.04 Water 0 Bare Ground 0.9 Brush Piles 0.003 Hardscape/Roads 0
Results representing annual average soil loss t/ay from hillslope, detachment limited erosion estimated by RUSLE3d in Owl Creek and neighboring watersheds:
% areas in different categories Original DEM +-----------------------------------------------------------------------------+ | RASTER MAP CATEGORY REPORT | |LOCATION: hood Tue Feb 13 16:39:20 2001| |-----------------------------------------------------------------------------| | Category Information | | % | | #|description | acres|cover| |-----------------------------------------------------------------------------| |-3000--20|severe erosion . . . . . . . . . . . . . | 908.200| 2.15| | -20--10|high erosion . . . . . . . . . . . . . . | 470.106| 1.11| | -10--5|moderate erosion . . . . . . . . .. . . . | 914.642| 2.16| | -5--1|low erosion. . . . . . . . . . . . . . . | 4692.963| 11.09| | -1-0|stable . . . . . . . . . . . . . . . . . |35,326.236| 83.49| |----------------------------------------------------------------------- |TOTAL |42,312.147|100.00| +-----------------------------------------------------------------------------+ reinterpolated DEM |----------------------------------------------------------------------| |-3000--20|severe erosion . . . . . . . . . . . . . | 2117.834| 4.99| | -20--10|high erosion . . . . . . . . . . . . . . | 1124.927| 2.65| | -10--5|moderate erosion . .. . . . . . . . . . . | 3365.822| 7.93| | -5--1|low erosion. . . . . . . . . . . . . . . |10,872.806| 25.63| | -1-0|stable . . . . . . . . . . . . . . . . . |24,947.007| 58.80| |----------------------------------------------------------------------| |TOTAL |42,428.396|100.00| +-----------------------------------------------------------------------
Maps
The purpose of this model is to provide maps of "hot spots" (red and magenta areas) where prevention measures should be considered.
Modified
USLE from original 10m DEM
Modified
USLE from original 10m DEM zoom-in, steps due to integers create
areas with zero slope and steeper slopes along 1m isoline,
Topographic
potential for erosion (LS factor)
Topographic
potential for erosion (LS factor)-zoom-in
Note: Owl Creek watershed seems to be much more stable than the neighboring watersheds, not just because of land use - it has much lower topographic potential for erosion especially in headwaters.
Field/1st order watershed scale - 2m resolution gully prevention We have explored the possibilities for multiscale representation and modeling of a small watershed with gully at Ft. Hood, with watershed represented at 2m resolution and gully at 0.4m resolution using field measurements. We have identified the missing links in the technology for succesful combination of data with different resolution without gaps.
4.2 Fort Polk sediment transport and wetlands.
We compared the vegetation map with the LCTA data, especially the C-factor and computed average C-factor for each vegetation type. The resulting C-factors are rather high compared to values for the same vegetation cover given in literature. It is possible that some of the LCTA sites have different actual land cover than the one in the map so I would appreciate some feedback on the procedures that CERL uses to determine the C-factor and on relevance of LCTA C-factor to this study. The following table shows the land cover categories that I have
and the C-factor based on LCTA and on literature.
land cover C-factor LCTA C-factor lit.
hardwood forest 0.01 0.0002
pine forest 0.01 0.0005
sparse pine 0.02 0.005
grass 0.02 0.001
thin grass 0.03 0.01
bare soil 0.2 0.5
Analysis of soil erosion and deposition by water for different conservation strategies
|
land use |
%agriculture (row crops) |
soil detachment: |
soil erosion/deposition: excess[1000t] legend[t/ay] |
comments |
|---|---|---|---|---|
|
bare |
N/A |
10,500 / 62
|
77 |
X |
|
corn |
100
|
5,200 / 31 |
38 |
X |
|
60 ft stream buffer |
96 |
4,800 / 28 |
19 |
only big streams have buffers |
|
100 ft stream buffer |
94 |
4,600 / 27
|
19 |
only big streams have buffers |
|
60ft stream buffer, forest on slopes > 10% |
81 |
2,000 / 12
|
15 |
X |
|
current |
63 |
1,300 / 8
|
4 |
grains on steep slopes add to erosion - possible error in LU? |
|
model-based, forest/dense grass where A>10 |
58 |
200 /
1.2
|
0.1 |
almost the same % of agriculture as current, but some are in too small patches |
2. Soil loss can be
further reduced by focusing on headwater areas and areas with
concentrated flow (possible gullies, interminent streams)
3.
Rules for conservation areas which include both distance from
stream and slope steepness are good, however they miss headwaters and
concentrated flow.
4. Stream buffers based only on a distance from
a stream do not provide sufficient protection - terrain
configuration has to be considered.
5. Erosion/deposition
model (USPED) shows significant deposition in valleys and hollows
(more than what we usually get from the model) - it needs to be
checked whether it is realistic or an artifact due to DEM.
6.
Modeling spatial distribution of soil detachment and net
erosion/deposition can provide valuable information for science based
extension/enhancement of rules for conservation program if it is used
with appropriate field observations.
water flow and erosion/deposition especially in streams if the fields in flat areas are a) drained (RST-based results and SIMWE indicates that substantial amount of water can be comming from there into the streams); b) without drainage with water accumulating and standing in depressions.
Preservation and restoration of wetlands is among the most important and popular best management practices. Their success depends on many factors, including a sufficient supply of water. The {\sl SIMWE} hydrologic submodel was used to identify the locations within the Court Creek Pilot Watershed which have topographic conditions favorable for wetlands.
Several simulations were performed for various rainfall intensities and uniform land cover and soil conditions assuming that the flow velocity is controlled only by the terrain gradient - the existing drainage and channels were not considered. Comparison of the resulting simulated water depth with existing wetlands has shown that the areas with existing wetlands have accumulated depth from one event overland flow of at least 0.3m (except for wetlands in the upland areas which were not captured by the 30m {\sl DEM} used in this study). Using this threshold,
a map for topographic potential for wetlands was computed using map algebra (Figure 5).
While the simulation was very simplified, the map can serve as a useful starting point for
identification of land owners with suitable land for wetlands and for evaluation of the proposals for wetland locations.
5. Conclusion and future directions
New data - direct field measurement still provide the most accurate data and with RTK can be done much more efficiently. However their spatial extent is limited. New photogrametric DEMs are based on accurate elevation measurements but suffer from postprocessing .... Installations should be aware that the 1m vertical precision is not sufficient and require at least 0.1-0.01 verticl precission (we were also asked to provide only 1m vertical for ftPolk so it appears t be standard???).
both examples demonstrate a need for linking this research with C-factor development
before accuracy of models is evaluated accuracy of parameters at landscape scale variability hsould be well
known - e.g. We should be able to say that we have C-fac 0.04+-0.005, or slope 11%+-1% (slope is known -
see gertner, unpublished Warren, etc
New models such as USPED and SIMWE show that convex parts of landscape have high potential for erosion (and at the same time are heavily used e.g. For roads). Traditional models and conservation measures are much more focused on lower parts of hillslopes....and ponds - depositing the sediment instead of minimizing it transport. Reducing transport (e.g. Bu reducing runodff and/or reducing its velocity) seems to be the most effective approach and may lead to new approaches to conservation ...
future - tighter link with field monitoring, including realtime...
intelligent interactive conservation design ...
extend multiscale path sampling beyond SIMWE to addresss briader applications to water quality issues which is of particular interest at military installation where threat to water quality may be increased due to ...
data assimilation, real time applications, ....
1. We have started to enhance the Simwe model to support the simulation of short term changes of terrain due to erosion in landscape with spatially variable land cover. The preliminary results show that this short term terrain change can have a profound impact on effectivness of
conservation measures and erosion/deposition patterns and should be therefore incorporated into erosion models.
Just a few years ago, there were numerous efforts to built comprehensive modeling and problem solving environments which would provide essentially everything for doing both the routine processing and advanced modeling as well as development of new methods and technologies. The practice, however, seems to be going in other directions as well. The large, universal, thought-through, all-powerful systems which were expected to support almost every possible research or development need ("research cathedral" , Raymond, 1999) are, in fact, not practical. The maintenance of large software package is expensive, rigid and inefficient. More successful is a concept of cooperation between a number of smaller software units and tools, environments and program packages. This concept enables to create more independent smaller pieces of software with simplified interdependencies. It enables for a number of groups or individuals to contribute and work on various parts simultaneously. If some branch of development proves to be uninteresting or unproductive it rapidly dies out without necessity to go through decision hierarchies usually present in the other paradigm. In contrast to the "cathedral" such a framework creates a "research bazaar" which offers variety of combinations and provides in effect a market of tools which can be combined together or used for data processing, modeling, method development and their combination. This in many cases is more useful for new advances in scientific exploration as the most exciting and influential research breakthroughs happen through stepping outside the established routes.
5. References
Badiger S.M, Cooke R.A.C (2000) Application of integrated GIS and numerical models in subsurface drainage studies. Proceedings of 4th conference on Environmental modeling and GIS, CDROM, Banff, Canada.
Band L.E., (2000 ) Urban watersheds as spatial object hierarchies. Proceedings of 4th conference on Environmental modeling and GIS, CDROM, Banff, Canada.
Burrough, P.A. (1998). Dynamic Modelling and GIS, Chapter 9, In: P.Longley et al.(Eds) Geocomputation: a Primer. Wiley, pp165-192.
Burrough, P.A., da Costa, J.R., Haurie, A., Fedra, K., Salvemini, M., & Hauska, H. (2000) MUTATE: a web-based distance learning programme for environmental modelling with GIS. Proceedings of 4th conference on Environmental modeling and GIS, CDROM, Banff, Canada.
Burnett D. S. (1987). Finite Element Analysis: From Concepts to Applications, Addison-Wesley, Reading, MA.
Cantin J.-F., Fortin P. (2000) Integration of Numerical Models and Field Characterization into a Georeferenced System for Oil Spill Emergency Response in the St. Lawrence River, Proceedings of 4th conference on Environmental modeling and GIS, CDROM, Banff, Canada.
Dabney, S.M. (1999) Lanscape Benching from Tillage Erosion Between Grass Hedges. Proceedings from ISCO Conference, CDROM, Lafayette: Purdue University.
Doe, W.W., B. Saghafian, and P.Y. Julien (1996). Land Use Impact on Watershed Response: The Integration of Two-dimensional Hydrological Modeling and Geographical Information Systems. Hydrological Processes, 10, 1503-1511.
ESRI (1999/2000) Four software products feature web-mapping functionality. Arc News 21, p. 7.
ESRI (1994) Cell-based Modeling with GRID. Redlands: ESRI.
ESRI (1996) Avenue: Customization and application development for ArcView. Redlands: ESRI.
Favis-Mortlock D., Boardman J., Parsons, T., Lascelles, B. (1998) Emergence and erosion: a model for rill initiation and development. Proceedings of the 3rd conference on GeoComputation (CDROM), University of Bristol, UK.
Gardiner, C. W., (1985) Handbook of Stochastic Methods for Physics, Chemistry, and the Natural Sciences. Berlin: Springer.
Goodchild, M.F, L. T. Steyaert, and B. O. Parks, eds., (1993) Geographic Information Systems and Environmental Modeling. New York: Oxford University Press.
Goodchild, M.F., L. T. Steyaert, and B. O. Parks, eds.,(1996) GIS and Environmental Modeling: Progress and Research Issues. Ft. Colins: GIS World, Inc.
Goodchild, M.F., L. T. Steyaert, and B. O. Parks, eds, (1997) GIS and Environmental modeling .Proceedings of the 3rd conference on GIS and Environmental modeling (Santa Fe), NCGIA, CDROM .
Green, T. R., Ascough, J. C. and Erskine, R.H. (2000) AgSimGIS for integrated GIS and agricultural system modeling: II. Application to soil-water dynamics in an undulating landscape in Colorado, Proceedings of 4th conference on GIS and Environmental modeling . CDROM, Banff, Canada.
Heinzer ,T.J., Sebhat, M., Feinberg, B. (2000) Case Studies using Geographis Information Systems to Facilitate Data Integration with MIKE21 when Modeling Flood Inundation Scenarios, Proceedings of 4th conference on Environmental modeling and GIS, CDROM, Banff, Canada.
Helleweger, F.L., Maidment, D.R. (1999) Definition and Connection of Hydrologic Elements Using Geographic Data, Journal of Hydrologic Engineering 4, 10-18.
Holland J and Goran W (2000) Development of a Land management system in support of natural resources management. Proceedings of 4th conference on Environmental modeling and GIS, CDROM, Banff, Canada.
Horn B. K. P. 1981 Hill shading and the reflectance map. Proc. IEEE 69, 14-46.
Johnston, D.M. and Srivastava, A. (1999) Decision Support Systems for Design and Planning: The Development of HydroPEDDS (Hydrologic Performance Evaluation and Design Decision Support ) System for Urban Watershed Planning, 6th International Conference on Computers in Urban Pl anning and Urban Management (CUPUMS'99), Venice, Italy
Khairy, W., Hannoura, A.P., Cothren, G.M. (2000). Application of Information Systems in Modelling of non-point pollution, Proceedings of 4th conference on Environmental modeling and GIS, CDROM, Banff, Canada.
Krysanova V., Wechsung F., (2000) Analysis of global change impacts at the regional scale by means of integrated ecohydrological modelling. Proceedings of 4th conference on Environmental modeling and GIS, CDROM, Banff, Canada.
Mitas, L., Mitasova, H., (1999) Spatial Interpolation. In: P.Longley, M.F. Goodchild, D.J. Maguire, D.W.Rhind (Eds.), Geographical Information Systems: Principles, Techniques, Management and Applications, Wiley, 481-492.
Mitasova, H., and Mitas, L. (1999) Erosion/deposition modeling with USPED. WWW tutorial.http://www2.gis.uiuc.edu:2280/modviz/erosion/usped.html
Mitas, L. and Mitasova, H. (1998) Distributed erosion modeling for effective erosion prevention. Water Resources Research, 34, 505-516.
Mitas, L., Brown, W. M., Mitasova, H. (1997) Role of dynamic cartography in simulations of landscape processes based on multi-variate fields. Computers and Geosciences, 23, 437-446 http://www2.gis.uiuc.edu:2280/modviz/lcgfin/cg-mitas.html
Mitasova, H., L. Mitas, B.M. Brown, D.P. Gerdes, I. Kosinovsky (1995) Modeling spatially and temporally distributed phenomena: New methods and tools for GRASS GIS. International Journal of GIS, 9 , 443-446.
Moore, I. D., A. K. Turner, J. P. Wilson, S. K. Jensen, and L. E. Band (1993) GIS and land surface-subsurface process modeling, in Geographic Information Systems and Environmental Modeling, edited by M. F Goodchild, L. T. Steyaert, and B. O. Parks, 196-230, Oxford University Press, New York.
Murray , S., Miller W., Breslin P. (2000) Visual framework for spatial modeling. Proceedings from the 4th conference on GIS and Environmental Modeling, CDROM, Banff, Canada.
Naumov, A. (2000) Design of high-level GIS data types for hydroecological modeling in GRASS. . Proceedings from the 4th conference on GIS and Environmental Modeling, CDROM, Banff, Canada.
Neteler, M. (2000). Advances in open source GIS software. Proceedings from the "1st National Geoinformatics Conference of Thailand, Bangkok.
Rewerts, C.C. and Engel, B.A. (1991) ANSWERS on GRASS: Integrating a watershed simulation with a GIS. ASAE Paper No.91-2621. American Society of Agricultural Engineers, St.Joseph, Missouri, 1-8.
Saghafian, B., (1996) Implementation of a Distributed Hydrologic Model within GRASS, in GIS and Environmental Modeling: Progress and Research Issues, edited by M. F Goodchild, L. T. Steyaert, and B. O. Parks, GIS World, Inc., 205-208.
Sluiter, R., Karssenberg,D, Burrough,P.A., Wesseling,C., de Jong, K., Van der Meer, M., van Steijn, H. & Jetten,V. (2000). GMOR: interactive computer models for teaching dynamic geomorphological processes, . Proceedings of 4th conference on Environmental modeling and GIS, CDROM, Banff, Canada.
Srinivasan, R. and B. A. Engel, (1991) A knowledge based approach to extract input data from GIS, ASAE Paper No. 91-7045, American Society of Agricultural Engineers, St.Joseph, Missouri, 1-8.
Srinivasan, R., and J. G. Arnold, (1994) Integration of a basin scale water quality model wi th GIS, Water Resources Bulletin, 30, 453-462.
Stakgold, I., (1979) Green's Functions and Boundary Value Problems, Wiley, New York.
Steyaert L. T., (1993) A perspective on the State of Environmental Simulation Modeling. Geographic Information Systems and Environmental Modeling, Oxford University Press, New York, 16-30
Raymond, E. S. (1999). The cathedral and the bazaar. O'Reilley.
Tucker, G., Gasparini, N., Bras, R., and Rybarczyk, P. (1999) An object-oriented framework for distributed hydrologic and geomorphic modeling using triangulated irregular networks. 4th International Conference on GeoComputation Fredericksburg: Mary Washington College
Vieux, B. E., N. S. Farajalla, and N. Gaur (1996) Integrated GIS and distributed storm water runoff modeling, in GIS and Environmental Modeling: Progress and Research Issues, edited by M. F. Goodchild, L. T. Steyaert, and B. O. Parks, GIS World, Inc., pp. 199-205.
C.G. Wesseling, D. Karssenberg, P.A. Burrough & W. van Deursen 1996, Integrating dynamic environmental models in GIS: the development of a Dynamic Modelling language. Transactions in GIS Vol 1: 40-48, 1996.
6. Appendix................................................24
owl10.cf = if(owl.lu<=8 && owl.lu>0||owl.lu==14,0.001,0.)\
+if(owl.lu==9||owl.lu==15,0.005,0.) \
+if(owl.lu==10,0.04,0.)+if(owl.lu==11,0.,0.) \
+if(owl.lu==12,0.9,0.)+if(owl.lu==13,0.003,0.)\
+if(owl.lu==16,0.,0.)
1:Juniper Forest
2:Live Oak Forest
3:Upland Deciduous Forest
4:North Slope Deciduous Forest
5:South Slope Deciduous Forest
6:Alluvial Deciduous Forest
7:Post Oak Forest
8:Maple Forest
9:Live Grassland/Herbaceous
10:Dormant Grassland/Herbaceous
11:Water
12:Bare Ground
13:Brush Piles
14:Urban Forest
15:Urban Grassland
16:Hardscape/Roads
r.report -n owl.lu units=a,p output=owllu.rep
---------------------------------------------------------------------
Processing of DEM
r.flow owl10.el dsout=owl10.dsd
r.slope.aspect owl10.el slop=owl10.sl asp=owl10.as dx=owl10.dx dy=owl10.dy
r.random owl10.el nsites=100000 sites_output=owl10.100K
s.surf.rst -t owl10.100K elev=owl10.rst80 ten=30 smo=0.2 npmin=350 dmin=20 slo=owl10sl.rst asp=owl10as.rst
r.flow owl10.rst80 dsout=owl10dsd.rst
r.slope.aspect owl10.rst80 dx=owl10rst.dx dy=owl10rst.dy
EROSION
----------------------------------------------------------------
R-factor is 280 in american units? check - this is according to NRCS
HUSLE
owhusle=0.3*-160*owl10.cf*1.6*exp(owl10.dsd*10/22.13,0.6)*exp(sin(owl10.sl/0.0896),1.6)
owhuslek=owl10.kf*-280*owl10.cf*1.6*exp(owl10.dsd*10/22.13,0.6)*exp(sin(owl10.sl/0.0896),1.6)
owlls.rst=1.6*exp(owl10dsd.rst*10/22.13,0.6)*exp(sin(owl10sl.rst/0.0896),1.6)
owhusle.rst=0.3*-160*owl10.cf*1.6*exp(owl10dsd.rst*10/22.13,0.6)*exp(sin(owl10sl.rst/0.0896),1.6)
owhuslek.rst=owl10.kf*-280*owl10.cf*1.6*exp(owl10dsd.rst*10/22.13,0.6)*exp(sin(owl10sl.rst/0.0896),1.6)
r.report -nC owhusle units=a,p output=owhusle.rep
r.report -nC owhuslek units=a,p output=owhusle.rep
r.report -nC owhusle.rst units=a,p output=owhuslerst.rep
r.report -nC owhuslek.rst units=a,p output=owhuslekrst.rep
USPED
p1, topo
oqs1x=owl10dsd.rst*10.*sin(owl10sl.rst)*cos(owl10as.rst)
oqs1y=owl10dsd.rst*10.*sin(owl10sl.rst)*sin(owl10as.rst)
r.slope.aspect oqs1x dx=oqs1x.dx
r.slope.aspect oqs1y dy=oqs1y.dy
owusped1to=(oqs1x.dx+oqs1y.dy)*10
p=1
oqs1x=owl10.kf*160*owl10.cf*owl10dsd.rst*10.*sin(owl10sl.rst)*cos(owl10as.rst)
oqs1y=owl10.kf*160*owl10.cf*owl10dsd.rst*10.*sin(owl10sl.rst)*sin(owl10as.rst)
r.slope.aspect oqs1x dx=oqs1x.dx
r.slope.aspect oqs1y dy=oqs1y.dy
owusped1=(oqs1x.dx+oqs1y.dy)*10.
A1.1
Modified USLE for GRASS and ArcView
A1.2
USPED for GRASS and ArcView
A1.3 GIS tools: enhanced
s.surf.rst,
r.flow,
r.slope.aspect,
r.enforce
manuals for r.enfrce and v.to.rastdir
script for creating a raster map from vector map digitized through NVIZ
A1.4 WWW
documents
Ft Hood:
elevation:
IFSARE: original, smoothed, field data smoothed
topographic
analysis: slope, aspect, upslope area
erosion: K, LS, USLE,
USPED, SIMWE
Ft. Polk
elevation: 20m
and 5m from points+contours
topo analysis: slope, aspect,
upslope area,
erosion: LS, topo erdep, SIMWE test
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
![legend[t/ay]](lghusle.gif){kind=link}
![legend[t/ay]](lgusped.gif){kind=link}